El DOBOT Nova2 es un brazo robótico versátil y compacto diseñado para atender fines comerciales y minoristas.
El Nova2 cuenta con una capacidad de carga útil de 2 kg, lo que le permite manejar varias tareas con precisión. Ya sea que se trate de ensamblaje, selección y colocación, prueba u otras operaciones complejas, el Nova2 proporciona la fuerza y destreza necesarias.
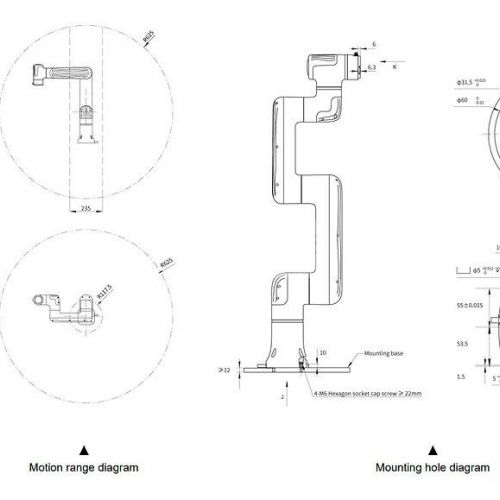
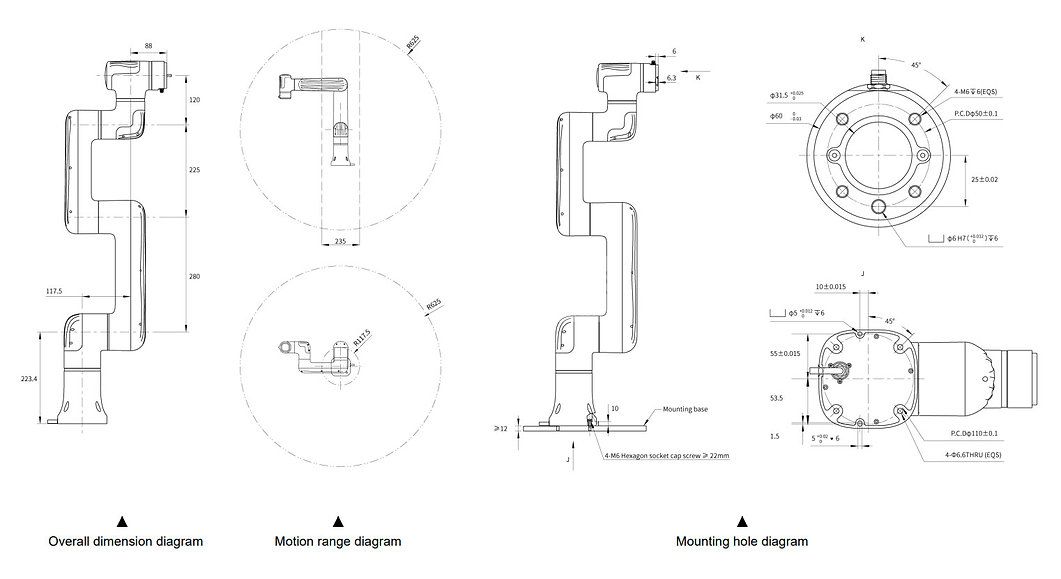
Ofrece un alcance máximo de 625 mm, proporcionando un amplio espacio de trabajo para manipular objetos y realizar tareas.
El Nova2 viene con una interfaz fácil de usar que simplifica la programación y el control. Ofrece múltiples opciones de programación, incluida una interfaz gráfica para una operación intuitiva y un sistema de programación basado en bloques similar a Scratch. Esto permite a los usuarios de todos los niveles de experiencia programar y personalizar fácilmente las acciones del robot de acuerdo con sus requisitos específicos. Ofrece múltiples opciones de programación, incluyendo la interfaz gráfica (como scratch), scripting usando lenguajes de programación (LUA) o API (C, C#, Python, Kotlin...), y la capacidad de enseñar al robot moviéndolo manualmente.
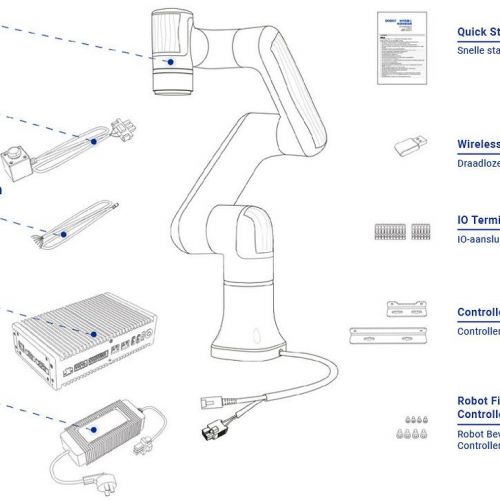
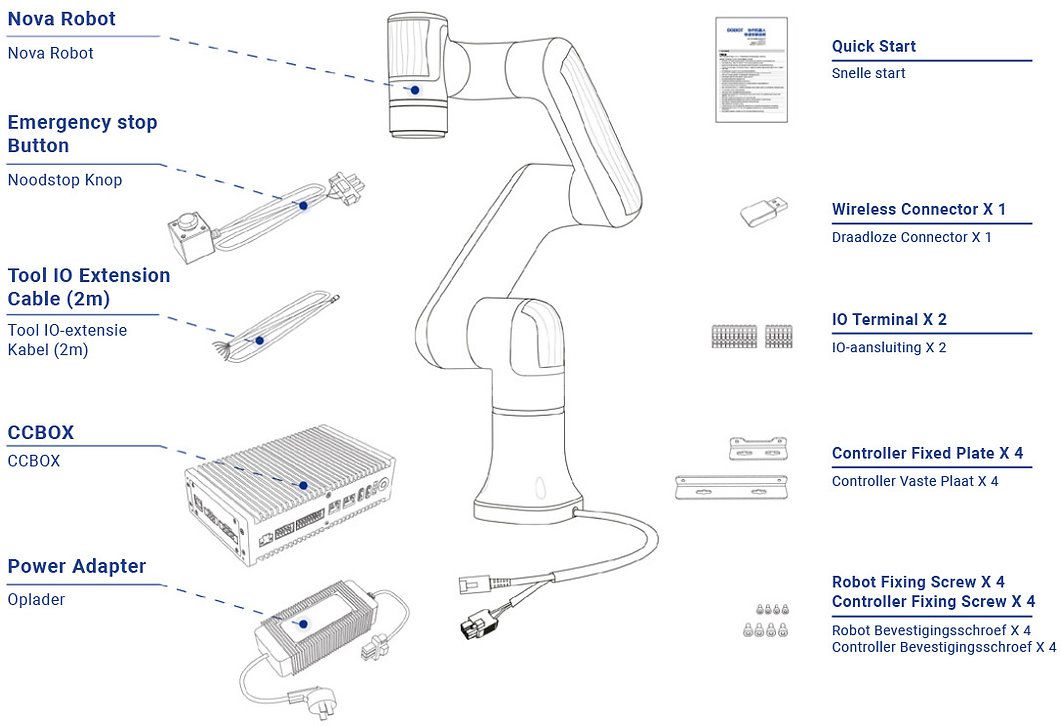
Además, el Nova2 es compatible con varios accesorios y periféricos, lo que permite una mayor personalización y expansión de sus capacidades. Se puede integrar a la perfección en configuraciones y flujos de trabajo existentes, lo que mejora la productividad y la eficiencia.
La seguridad es una prioridad con el Nova2, ya que incorpora funciones avanzadas como detección de colisiones y capacidades de parada de emergencia. Estas medidas de seguridad garantizan un entorno de trabajo seguro y protegen tanto al robot como a los operadores.
| Peso | 11 kg (24,3 libras) | |
| Carga útil máxima | 2 kg (4,4 libras) | |
| Radio de trabajo | 625 mm (24,6 pulgadas) | |
| Velocidad máxima de TCP | 1,6 m/s (63 pulgadas/s) | |
| Repetibilidad | ±0,05 mm | |
| Rango de movimiento | J1 | ± 360° |
| J2 | ± 180° | |
| J 3 | ± 156° | |
| J4 | ± 360° | |
| J5 | ± 360° | |
| J6 | ± 360° | |
| Velocidad máxima de articulación | J1/J2/J3 | 135 °/s |
| J4/J5/J6 | 135 °/s | |
| E/S final | TRAVESURA | 2 entradas |
| RS485 | Soportado | |
| Clasificación del IP | IP54 | |
| Ruido | 65dB(A) | |
| Rango de temperatura | 0° a 50°C | |
| Orientación de instalación | Cualquier ángulo | |
| El consumo de energía | Típico | 100W |
| Máximo | 250W | |
| Longitud del cable desde el robot hasta el controlador | 3 m (118,1 pulgadas) | |
| Materiales | Aleación de aluminio, acrilonitrilo butadieno Plástico de estireno | |
| Controlador | |||
| Dimensiones | 200 mm x 120 mm x 55 mm (7,9 pulgadas x 4,7 pulgadas x 2,2 pulgadas) | ||
| Peso | 1,3 kg (2,9 libras) | ||
| Potencia de entrada | 30 ~ 60 V CC | ||
| Potencia de E/S | 24V, Max 2A, Max 0.5A para cada canal | ||
| Interfaz E/S | DI | 8 entradas (NPN o PNP) | |
| HACER | 8 entradas (NPN o PNP) | ||
| AI | 2 entradas, modo voltaje, 0~10V | ||
| OA | 2 salidas, modo voltaje, 0~10V | ||
| Encendido/apagado remoto | Soportado | ||
| Interface de comunicación | Interfaz de red | 2, para comunicación TCP/IP y Modbus TCP | |
| USB | 2, para conectar el módulo inalámbrico USB | ||
| Interfaz 485 | 1, para comunicación RS485 y Modbus RTU | ||
| Ambiente | Temperatura | 0° a 50°C | |
| Humedad | ≤95%, sin condensación | ||
| Clasificación del IP | IP20 | ||
| Modo de enfriamiento | Disipación de calor pasiva | ||
| Modo de enseñanza | PC, APLICACIÓN (Android, iOS) | ||



{kind=link}
{kind=link}
{kind=link}