
 English
English
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
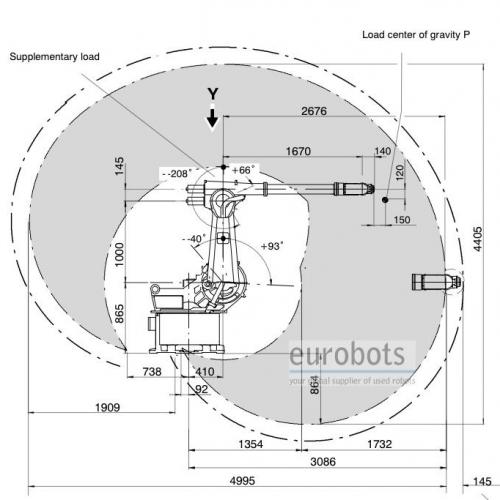
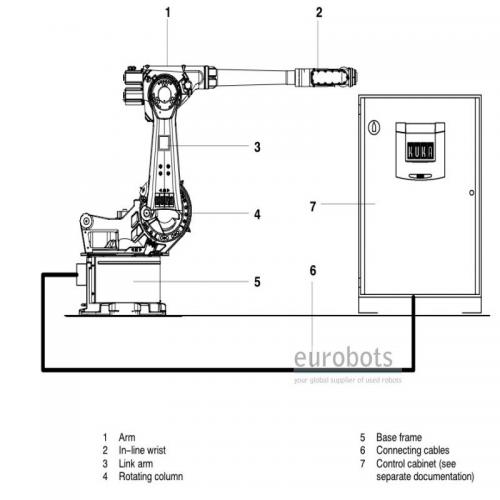
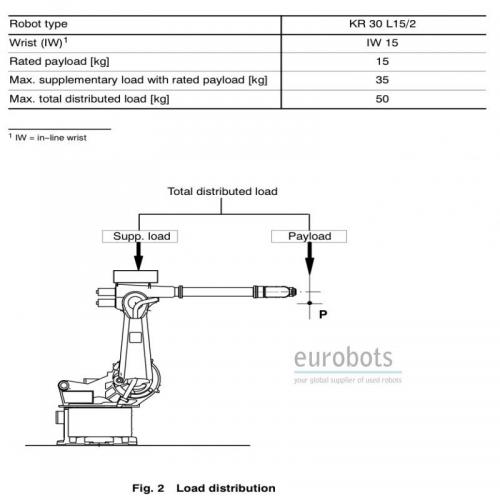
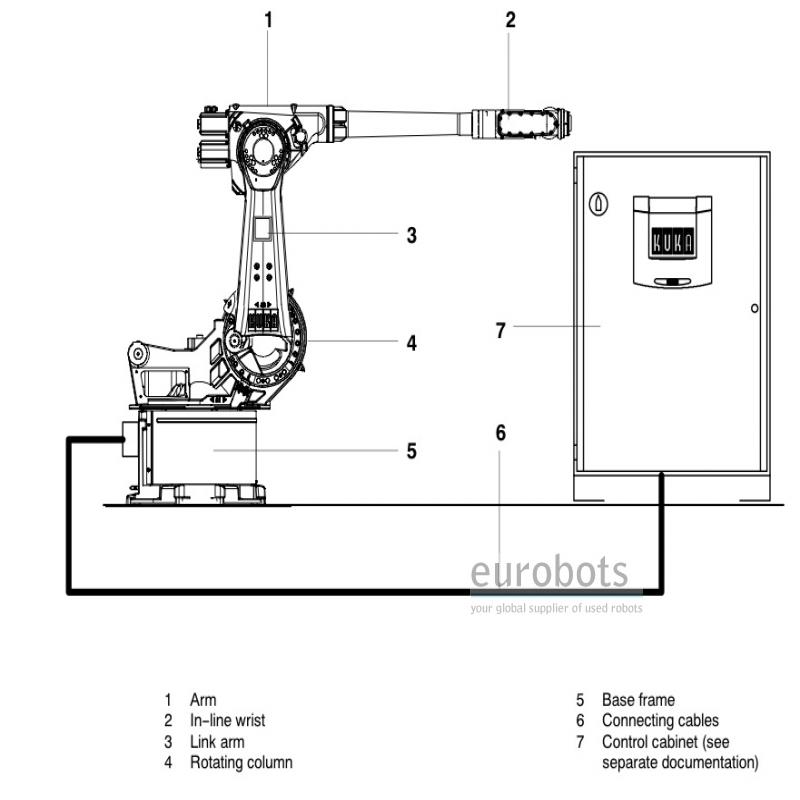
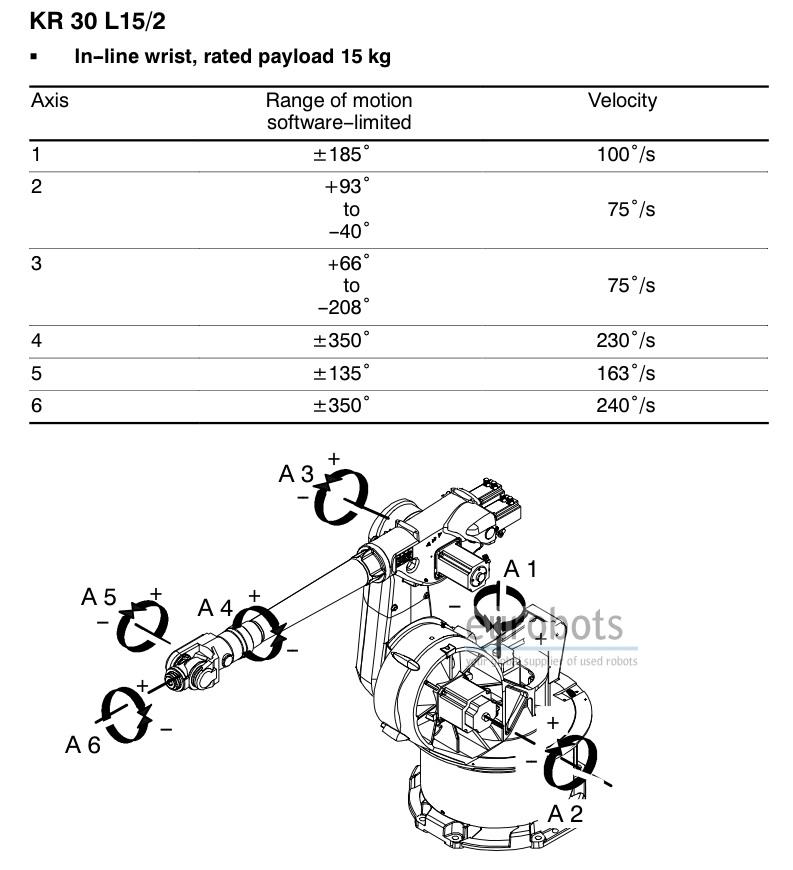
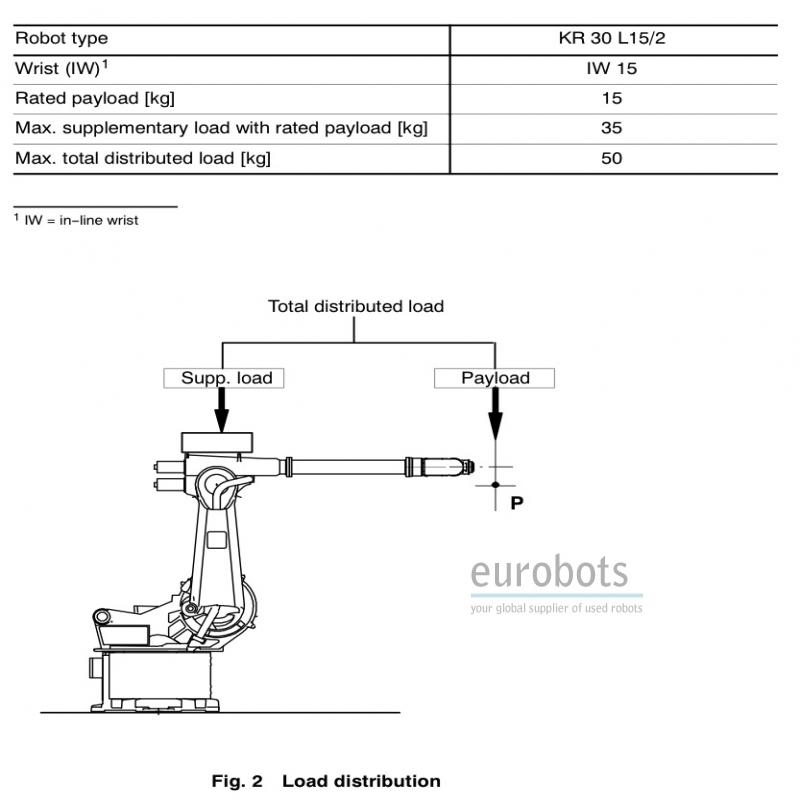
KUKA KR30L15
Robots de baja carga utíl, son rápidos y precisos, cubren un área de trabajo muy extensa de 3085 mm de radio. Año de fabricación 2001.
Equipados con el control KRC1 de KUKA, versión de software 4.1.4
Control KR C1 bajo entorno Windows. Conexiones señales CANBUS, Interbus, Ethernet...
Posibilidad de integración en el control de la opción Conveyor tracking para manipulación de piezas en líneas productivas en movimiento.
Reductoras serie Tj de alta fiabilidad.
Especificaciones del controlador KR C1:
- Tecnología de PC abierta con capacidad de red.
- CAN / DeviceNet y Ethernet de serie. Las ranuras para los sistemas de bus habituales (p.ej. INTERBUS-S, FIPIO).
- Función integrada de osciloscopio para el soporte de diagnóstico y programación del robot
- Función de perfil de movimiento para la interacción óptima entre los motores del robot individuales y su velocidad.
- Unidades de disco y CD-ROM Floppy para realizar copias de seguridad de los datos.
- Instalaciones como funcionamiento maestro / esclavo de robots o diagnóstico a distancia a través de Internet.
- Fácil manejo y programación a través de KUKA Control Panel (KCP) con Windows 95
- Interfaz gráfica de usuario.
- Compacto, armario de distribución apilable.
- Un controlador para todos los modelos de robots.
- Diseño ergonómico KCP.
Datos generales:
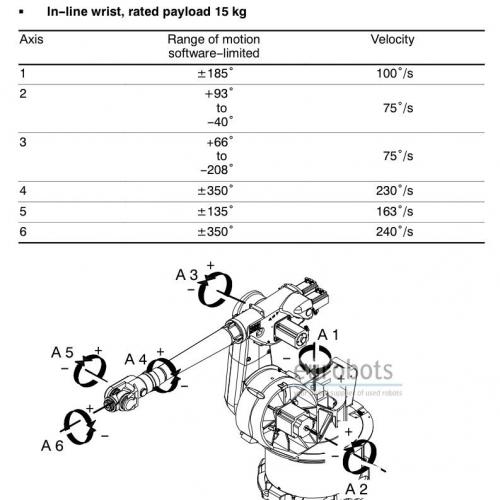
- Capacidad carga: 15Kg.
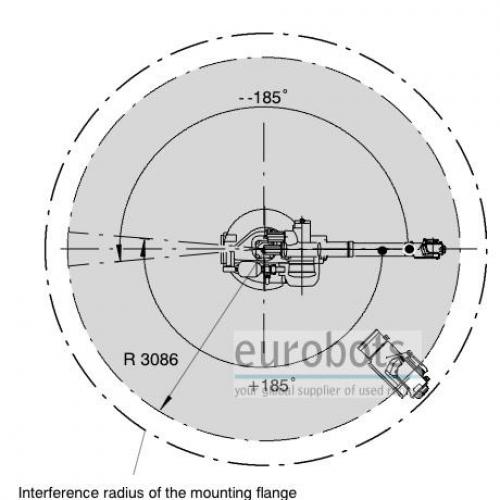
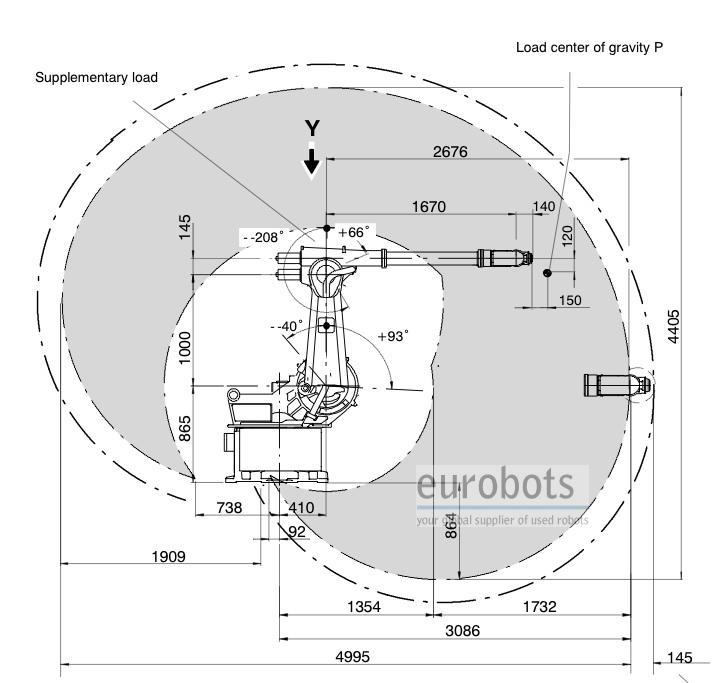
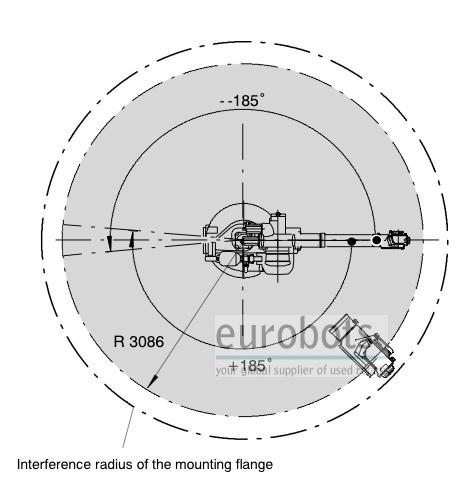
- Máximo alcance: 3085 mm.
- Precisión en la repetición: 0,15 mm.
- Controlador: KR C1.
Velocidad ejes:
- Eje 1: 100º/seg
- Eje 2: 75º/seg
- Eje 3: 75º/seg
- Eje 4: 230º/seg
- Eje 5: 163º/seg
- Eje 6: 240º/seg
Aplicaciones del Robot:
- Mecanizado
- Carga de máquina
- Pulir, esmerilar, desbarbar
- Revestimiento y pegamento
- Manipulación
- Medición y control
- Montaje
- Paletización y preparación de pedidos
- Corte
- Soldadura
Aplicaciones
Soldadura por arco , Pintura , Carga y descarga de piezas , Mecanizado , Manipulación de piezas , Medición , Corte por láser









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}