
 English
English
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
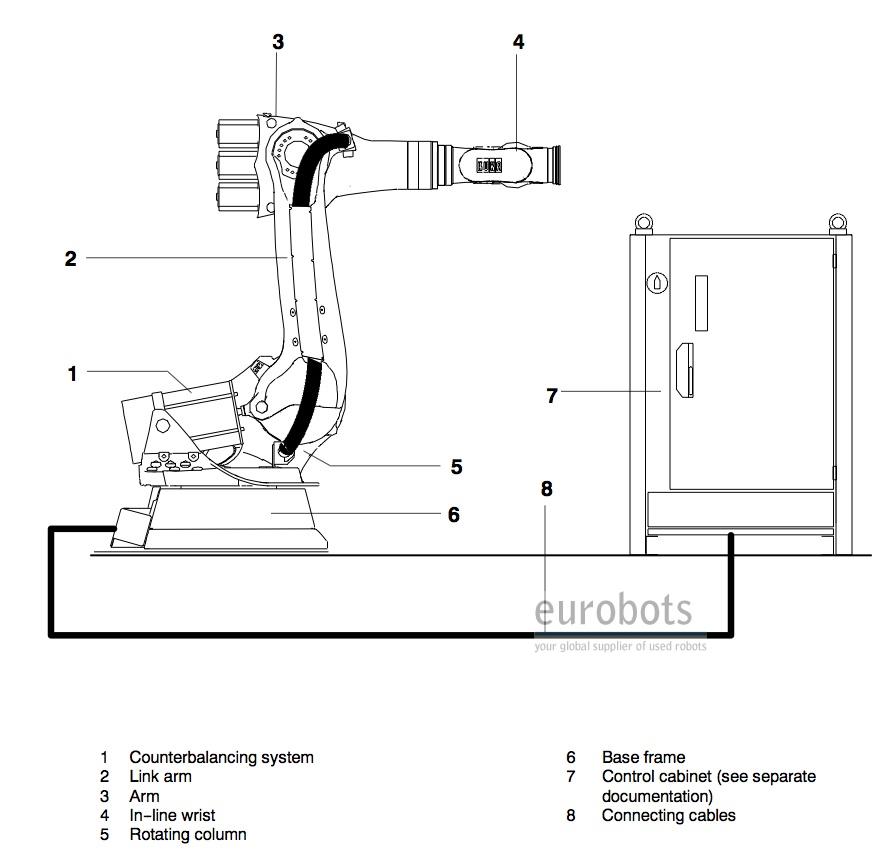
KUKA KR210-2
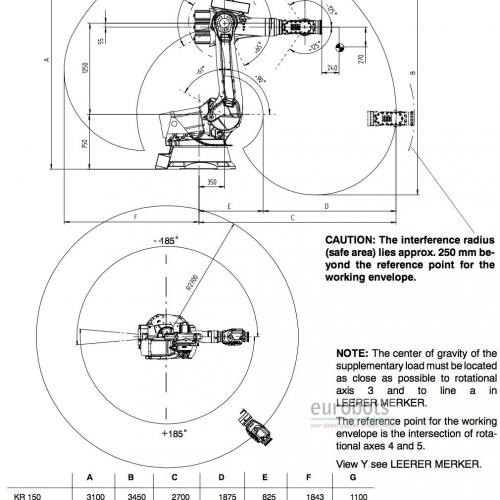
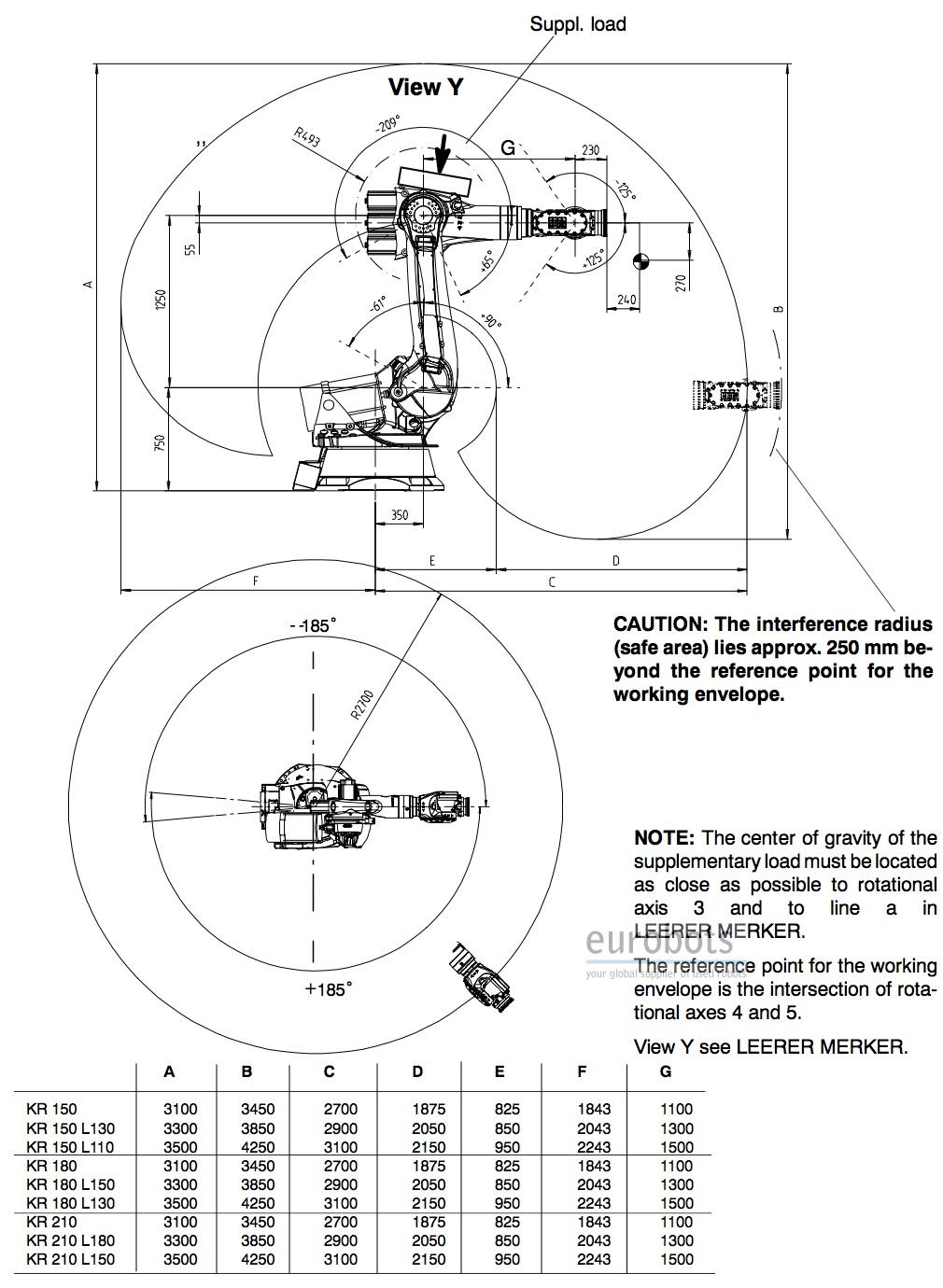
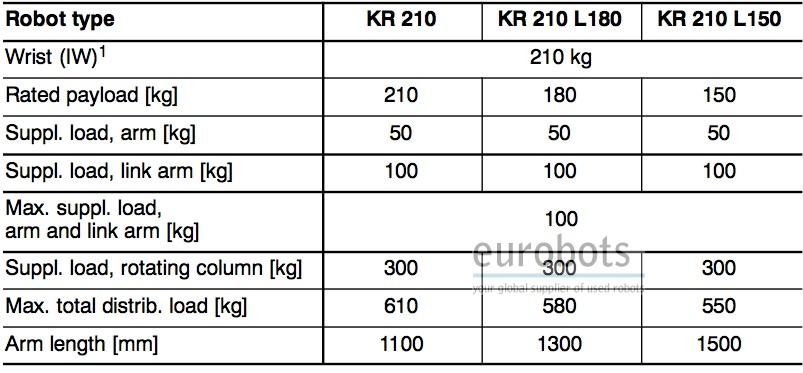
Robot industrial carga pesada de 6 ejes, disponible en tres versiones que asisten al alcance brazo / carga útil: KR 210-2 (2700 mm / 210 kg), KR 210L180-2 (2900 mm 180 kg), KR 210L150-2 (3100 mm / 150 kg).
Adecuado para aplicaciones de mecanizado, soldadura por puntos, manipulación y paletizado.
Equipado con el controlador KRC2 disponible en dos versiones que asisten a la versión de software: 4.1.7 ejecutan en Win95 o 5.2.9 en la plataforma Windows XP.
El control del robot KR C2 facilita la programación con su interfaz de Microsoft Windows. Es ampliable, se puede integrar en las redes a través de un bus y contiene paquetes de software ya hechos.
Características KR C2
- Tecnología abierta de PC compatible con la red
- 2 puertos libres para ejes externos
- DeviceNet y Ethernet ranuras para sistemas de bus habituales (p.ej. INTERBUS, PROFIBUS, DeviceNet) proporcionan como estándar
- Función de perfil de movimiento para la interacción óptima entre los motores del robot y sus respectivas velocidades
- Unidades de disquete y CD-ROM para la copia de seguridad de datos
- Las instalaciones tales como el diagnóstico a distancia a través de Internet
- Operación simple y la programación a través del Panel de control KUKA (KCP) con interfaz de usuario de Windows
- Gabinete de control compacto
- Panel de control KUKA ergonómico (KCP)
Datos Generales
- Carga máxima de Robot: 210/180/150 Kg
- Alcance máximo: 2700/2900/3100 mm
- Repetibilidad : 0,15
- Controlador: KR C2
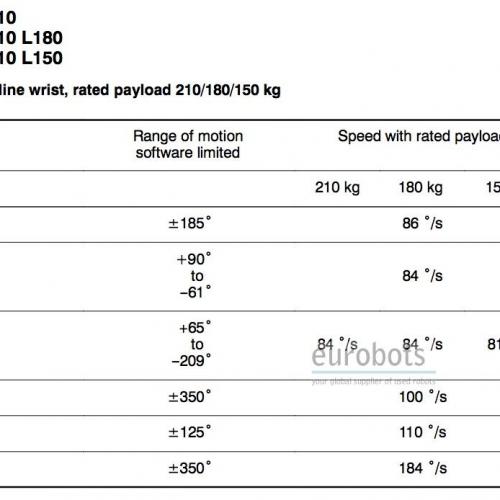
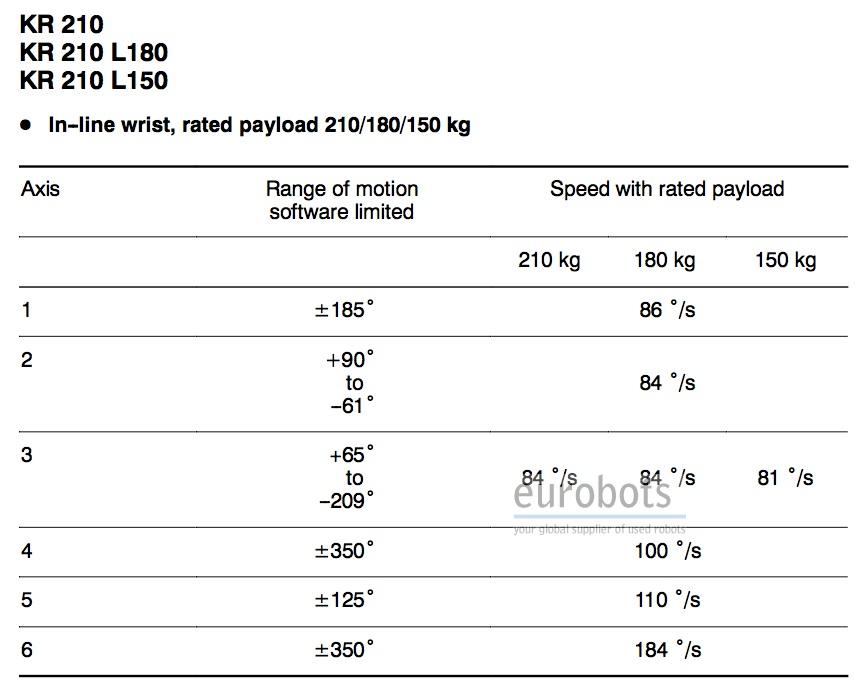
Velocidad Dde los ejes en º / s para los modelos : KR 210-2 / KR 210 L180-2 / KR 210 L150-2
- Eje 1 : 86º / s ( los 3 modelos)
- Eje 2 : 84º / s ( los 3 modelos)
- Eje 3 : 84º / 84º s / s 81º / s
- Eje 4 : 100º / s ( los 3 modelos)
- Eje 5 : 110º / s ( los 3 modelos)
- Eje 6 : 184º / s ( los 3 modelos)
El rango de movimiento ( eje 1 a 6)
- Eje 1: + - 185º
- Eje 2: + 90 a -61º
- Eje 3: + 65º a -209º
- Eje 4: + -350º
- Eje 5: + -125º
- Eje 6: + -350º
Aplicaciones
Soldadura de punto , Presione tendiendo , Paletización , Carga y descarga de piezas , Mecanizado , Manipulación de piezas , Pegado - Pegado adhesivo , soldadura pernos , Corte por plasma












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}